Sworrd Art Online Intagril Fsctor Switch Tutorial Not Working
Tuning a PID controller tin be difficult knowing where to outset, and what management to go. This article will provide solutions to both of these, setting upwards a PID controller from scratch and more than!
To starting time, read "PID Controller Explained", to learn what a PID controller is and how it works. And also the PID Simulator page to utilize a live PID Simulator!
Information technology is practiced to note early in this postal service, that in that location can be many values that work for the same device. The important thing is non to discover the "perfect" values, but to notice ones that meet the requirements, and provide desired control.
Finding Initial PID Values
Starting time ensure everything is mechanically audio with the device being controlled. More times than not, people will attempt to"melody" PID values to fix an issue, but the issue is a physical one, not an automation ane. In one case everything is verified, nosotros can start to program!
Proportional
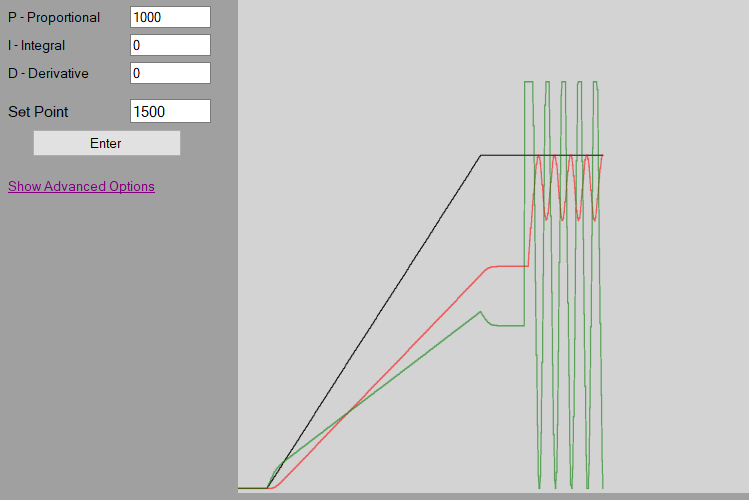
Start by setting the Integral and Derivative values to 0. Then increase the proportional until the controller starts to become unstable and oscillate.
A controller where the oscillations become smaller is considered a "stable" controller, every bit eventually information technology will stabilize, and when the oscillations outset getting larger is an"unstable" controller.
Once the proportional value that causes the controller to oscillate is plant, have this value and carve up it in half. This will be the starting P value.
Instance: in the picture, the proportional gain that causes the controller to get unstable is 1000, then the starting proportional value will be 500.
Integral

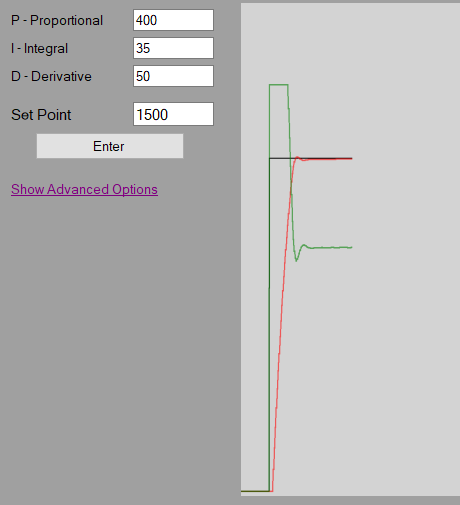
One time the proportional value is found, we tin get-go to tune the integral. Always get-go with modest steps when adjusting a PID controller, and give time between each adjustment to see how the controller reacts.
Increase the integral gain in small increments, and with each adjustment, change the set point to see how the controller reacts.
The goal of tuning the integral value, is to reach an adequate controller response or reaction time (after the initial response from the proportional is set up).
If the controller starts to oscillate, or become unstable, arrange the I value in the opposite direction until the controller becomes stable again. In one case the controller is stable, and responding desirably… congrats! yous at present accept a working PI controller.
I will post a video at the lesser of this article that shows these steps within the automatic PID Simulator to provide a practical instance for those (similar myself) who are more visual learners.
For the hands on learners, download the PID Simulator app from the Microsoft Store to put these steps into do!
Derivative
There are many PI controllers out there, and for certain applications, this is all that is required. But if your application could benefit from the dampening effects of the derivative, you will demand to find the value that works!
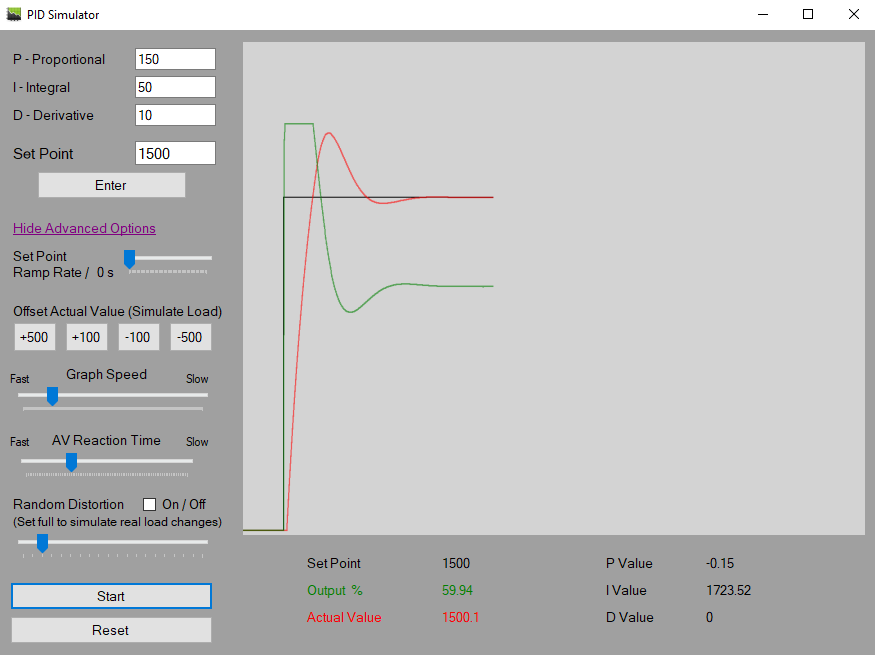
Now that you lot have a stable PI controller, start by increasing the derivative value slowly, irresolute the prepare point, and assuasive time for the controller to stabilize.
The purpose of the D value, is to monitor the ramp rate of the process value, and prevent it from overshooting the fix point.
Continue to alter the fix point and increase the derivative until the overshoot has been dampened to an acceptable level. If the controller starts to react in a negative way (unexpected changes in the output, poor command, or oscillation) lessen the D value until the controller is stable again.
Exist careful when adjusting the derivative value, every bit a college value is tempting – anybody wants a smoothen controller don't they? – just too high of a derivative will start to effect the output in a negative way and "fight" what the P and I values are trying to accomplish.
The other business organization with a high D value,is if there is noise or distortion of the process value feedback, the derivative may see this as a fast change in the ramp rate, and bias the output at an undesired time.
For more than on tuning the derivative check out the video below.
Advanced Tuning of a PID Controller
One time the initial values are constitute (by following the steps above), you can outset to alter the set signal, and put the controller through some simulations to run into how information technology react.
In that location is no set up formula for advanced tuning of a PID controller, and no step-past-step process that will work in every scenario, just with an understanding of how a PID controller works, and plenty do, it is definitely possible. To do tuning a PID controller, download the great PID Simulator app from the Microsoft Store!
Watching how the controller reacts, volition lead you towards which value (or values) should be inverse.
The PID controller is not reacting fast enough:
Watch the initial response of the PID controller output, if the initial response is fast (a steep peak in the output) just the post-obit few seconds seems to be slower reacting, then the integral value volition demand adjusting. Increment the integral gain until the desired reaction time is reached, but be careful not to go too loftier and crusade oscillations.
If the initial PID controller response (immediate response of the output), endeavour increasing the proportional value. Annotation, if the proportional proceeds is increased, put the controller through some tests, to run into if the derivative gain will also demand increased to forestall the overshooting that may occur.
The PID controller is overshooting:
Look at the initial response of the PID controller, if the initial response is also loftier, then decreasing the proportional (or perchance the integral) could correct the overshoot. Nonetheless, if the reaction time is practiced an the PID controller is stable, then increasing the derivative slightly may exist all that is required, to dampen the overshoot.
The PID controller is not stable, or aquiver:
An unstable or oscillating PID controller can be i of the nearly difficult to address. Before adjusting, double bank check that in that location is no external or physical forces causing the effect.
If the oscillations are acquired by the output spiking instantly to 100% and then downwardly to 0% and back, likely the proportional gain is set too high. Start past decreasing the derivative gain to a depression setting (to ensure information technology is not causing the instability), then decrease the proportional gain until the controller becomes more than stable.
If the output is not spiking instantly, but seems to be over and undershooting, then the integral value is likely likewise loftier. Decrease the integral gain until the controller becomes stable.
If all else fails, yous can re-set the PID values, and prepare-up the PID controller from the offset every bit described higher up.
Hope this article has helped, bank check out the video beneath for a interactive walk through!
pelletierhanotaink74.blogspot.com
Source: https://pidexplained.com/how-to-tune-a-pid-controller/
0 Response to "Sworrd Art Online Intagril Fsctor Switch Tutorial Not Working"
Post a Comment